首先我们需要知道,什么是网络,什么是流。
# 网络
网络是指一个有向图 $G = <V, E>$ (不是互联网)。
每条边 $(u, v) \in E$ 都有一个权值 $c(u, v)$ ,称之为容量(Capacity),当 $(u, v)\not \in E$ 时有 $c(u, v) = 0$ 。
其中有两个特殊的点:源点(Source)$s \in V$ 和汇点(Sink)$t \in V$ 。
如下图所示,这就是一个网络:
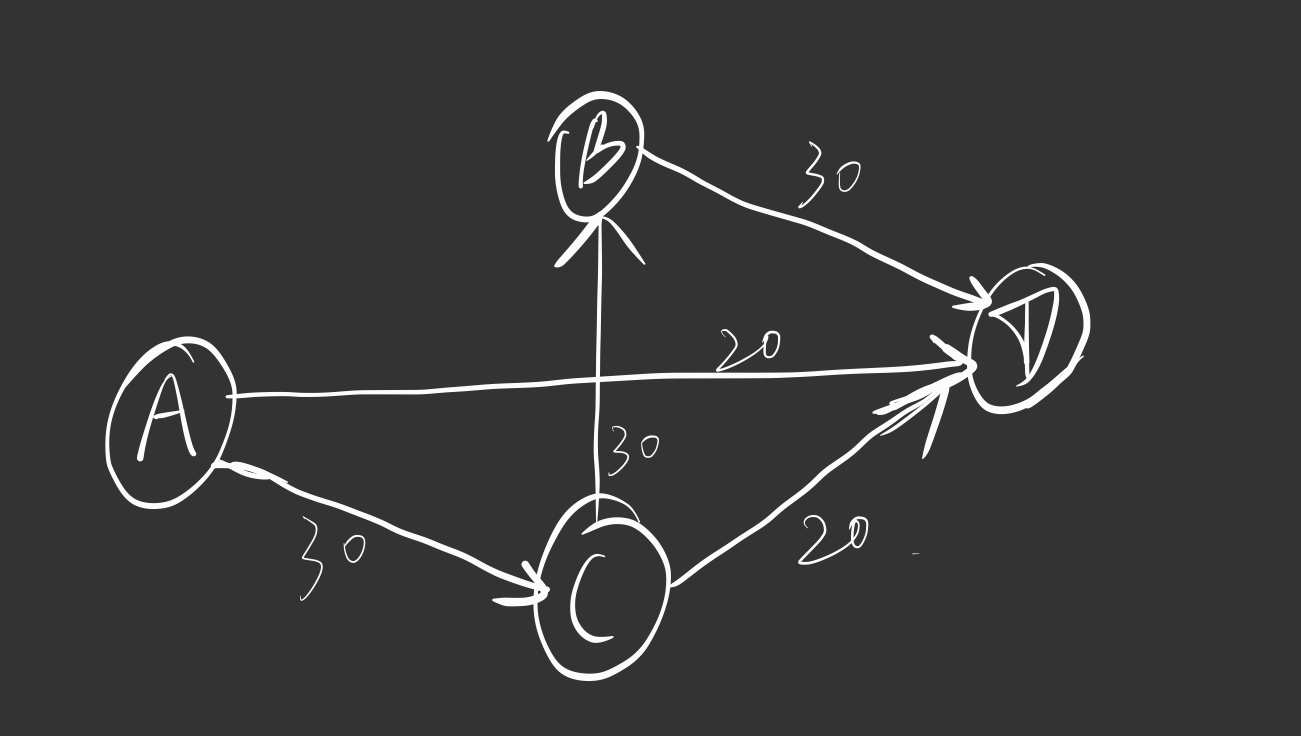
其中,A为源点,D为汇点
事实上我们可以发现,源点的入度为0,汇点的出度为0
# 流
设 $f(u,v)$ 定义在二元组 $(u\in V,v\in V)$ 上的实数函数且满足
- 容量限制:对于每条边,流经该边的流量不得超过该边的容量,即,$f(u,v)\leq c(u,v)$
- 斜对称性:每条边的流量与其相反边的流量之和为 0,即 $f(u,v)=-f(v,u)$
- 流守恒性:从源点流出的流量等于汇点流入的流量,即 $\forall x\in V-{s,t},\sum_{(u,x)\in E}f(u,x)=\sum_{(x,v)\in E}f(x,v)$
那么 $f$ 称为网络 $G$ 的流函数。对于 $(u,v)\in E$,$f(u,v)$ 称为边的 流量,$c(u,v)-f(u,v)$ 称为边的 剩余容量。整个网络的流量为 $\sum_{(s,v)\in E}f(s,v)$,即 从源点发出的所有流量之和。
一般而言也可以把网络流理解为整个图的流量。而这个流量必满足上述三个性质。
注:流函数的完整定义为
$$
f(u,v)=
\begin{cases}
\begin{aligned}
&f(u,v),&(u,v)\in E\
&-f(v,u),&(v,u)\in E\
&0,&(u,v)\notin E,(v,u)\notin E
\end{aligned}
\end{cases}
$$
# 网络流的常见问题
网络流问题中常见的有以下三种:最大流,最小割,费用流。
# 最大流问题
我们有一张图,要求从源点流向汇点的最大流量(可以有很多条路到达汇点),就是我们的最大流问题。
# Ford-Fulkerson 增广路算法
该方法通过寻找增广路来更新最大流。求解最大流之前,我们先认识一些概念。
# 定义
- 容量:$c(u, v)$ 表示一条有向边 $e(u, v)$ 的最大允许的流量。
- 流量:$f(u, v)$ 表示一条有向边 $e(u, v)$ 总容量中已被占用的流量。
- 剩余容量:即 $c(u, v) - f(u ,v)$ ,表示当前时刻某条有向边 $e(u, v)$ 总流量中未被占用的部分。
- 反向边:原图中每一条有向边在残量网络中都有对应的反向边,反向边的容量为 $0$ ,容量的变化与原边相反;反向边的概念是相对的,即一条边的反向边的反向边是它本身。
- 残量网络:在原图的基础之上,添加每条边对应的反向边,并储存每条边的当前流量。残量网络会在算法进行的过程中被修改。
- 增广路(
augmenting path):残量网络中从源点到汇点的一条路径,增广路上所有边中最小的剩余容量为增广流量。 - 增广(
augmenting):在残量网络中寻找一条增广路,并将增广路上所有边的流量加上增广流量的过程。 - 层次:$level(u)$ 表示节点 $u$ 在层次图中与源点的距离,我们以边的数量来表示。
- 层次图:在原残量网络中按照每个节点的层次来分层,只保留相邻两层的节点的图,满载(即流量等于容量)的边不存在于层次图中。
首先,我们来看看,增广路算法的过程是什么样的(一个被用烂掉的动图):
我们可以发现,这种思想遵循四个步骤:
- 找到一条从源点到汇点的路径,使得路径上任意一条边的残量 > 0
- 找到这条路径上最小的剩余容量,我们不妨设为 $flow_{min}$
- 将这条路径上的每一条有向边的残量 减去 $flow_{min}$, 同时每一条有向边的反向边的残量 加上 $flow_{min}$
- 重复上述过程,直到不存在增广路
那么我们会有一个问题,我们为什么要有反向边这个东西?
这是因为在做增广路时可能会阻塞后面的增广路,或者说,做增广路本来是有个顺序才能找完最大流的,但我们是任意找的,为了修正,就每次将流量加在了反向弧上,让后面的流能够进行自我调整。
比如下面这个模型,如果我们不建立反向边的话:
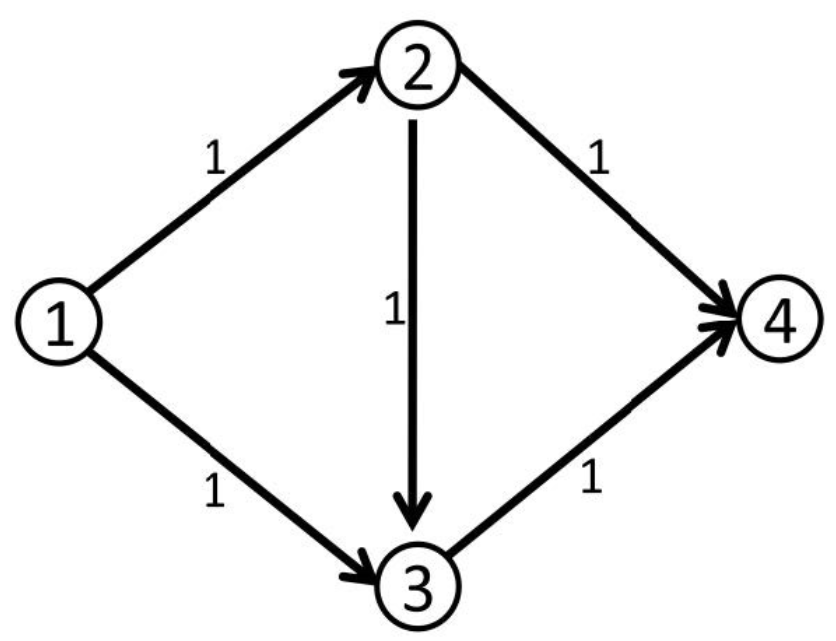
我们可以找到 $1\to 2 \to 3 \to 4$ 这条增广路,显然我们找到了一个最大流(因为没有其他增广路了)为 $1$
但实际上这个答案错误的,我们可以走 $1\to 2\to 4$ 和 $1\to 3\to 4$ 以得到最大流为 $2$
那么我们的算法错在什么地方呢?
问题在于,我们走 $1\to 2 \to 3 \to 4$ 后,没有给自己留下一个后悔的机会,应该给自己一个不走 $2\to 3\to 4$ 走 $2\to 4$ 的机会。
所以,我们需要建立 反向边 这样一个东西,来给我们一个后悔的机会。
具体而言,我们将:
- 在找到一条增广路时,我们在路径上减去最小剩余容量的同时,还会在反向边上加上这个最小剩余容量
依然是上面的例子,在引入反向边后,我们找到 $1\to 2 \to 3 \to 4$ 这条路径,我们将模型修改为:
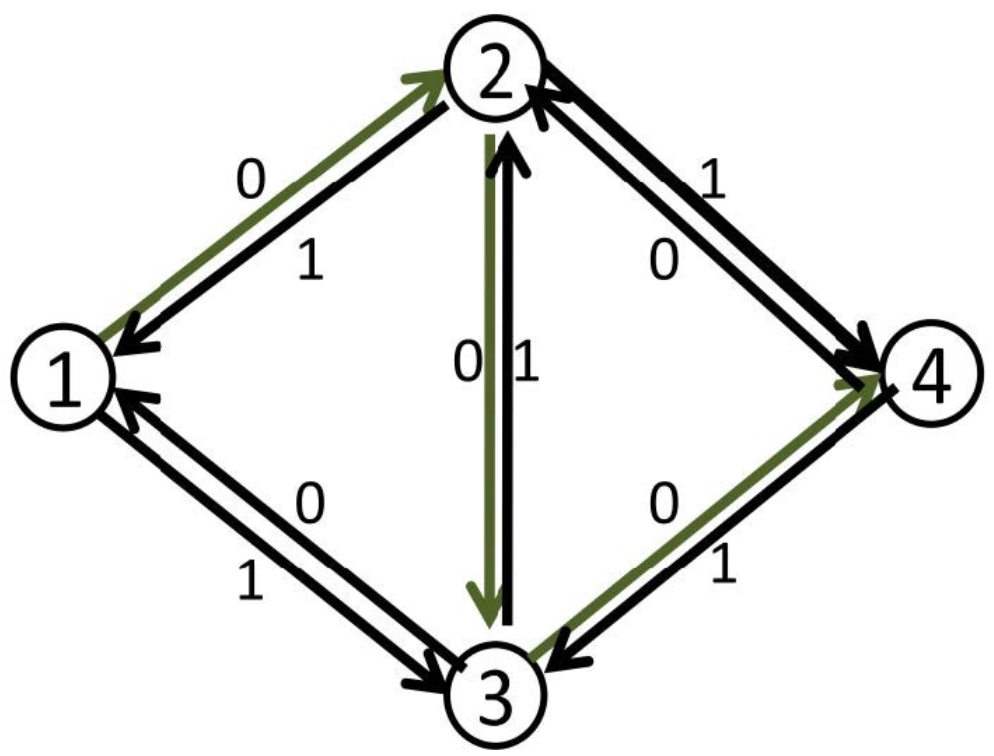
这个时候,我们再去寻找一个增广路,我们就可以找到 $1\to 3 \to 2 \to 4$ 这样一条增广路,这样就可以得到最大流为 $2$ 。
而事实上,当我们走 $1\to 3 \to 2 \to 4$ 这条路时,我们走过了 $3 \to 2$ 这一条反向边,也就相当于说,我们把原来 $2 \to 3$ 这条边的流量给退回去了,不 走 $2\to 3$ 这条路,相当于是为第一次的天真选择买了一次后悔药(bushi
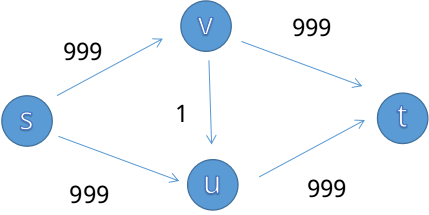
于是,我们已经掌握了朴素的计算最大流的方法了,但单纯这样会陷入一些尴尬的情况,比如一个经典案例:
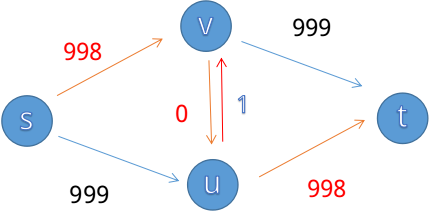
我们可以一眼看出来最大流是两刀999,但增广路不这么想,它可能会选择 $s\to v\to u\to t$ 这条路,那么根据上面的算法:
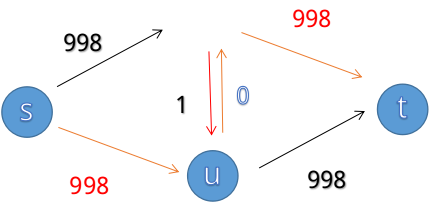
我们会得到这样一个网络,那么在下一次寻找增广路时,万一选择了 $s\to u\to v\to t$ ,我们就变成了:
显然,我们会经历两刀999次的增广路寻找,才能得出最大流。
当999变成 $10^{10}$ 甚至更大时,这种低效的算法是无法接受的,于是,我们引入了
Dinic算法。
#
Dinic 算法
Dinic 算法 的过程是这样的:每次增广前,我们先用 BFS 来将图分层。设源点的层数为 $0$,那么一个点的层数便是它离源点的最近距离。
通过分层,我们可以干两件事情:
- 如果不存在到汇点的增广路(即汇点的层数不存在),我们即可停止增广。
- 确保我们找到的增广路是最短的。
接下来是 DFS 找增广路的过程。
我们每次找增广路的时候,都只找比当前点层数多 $1$ 的点进行增广(这样就可以确保我们找到的增广路是最短的)。
举一个例子来解释:
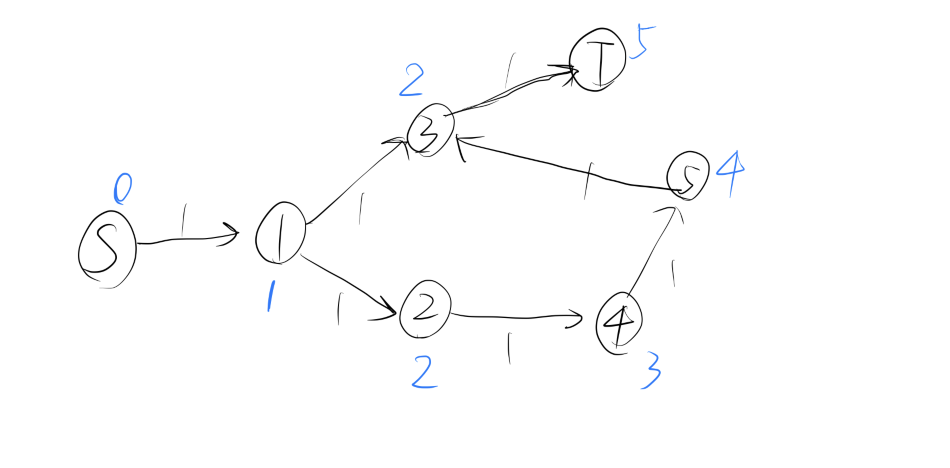
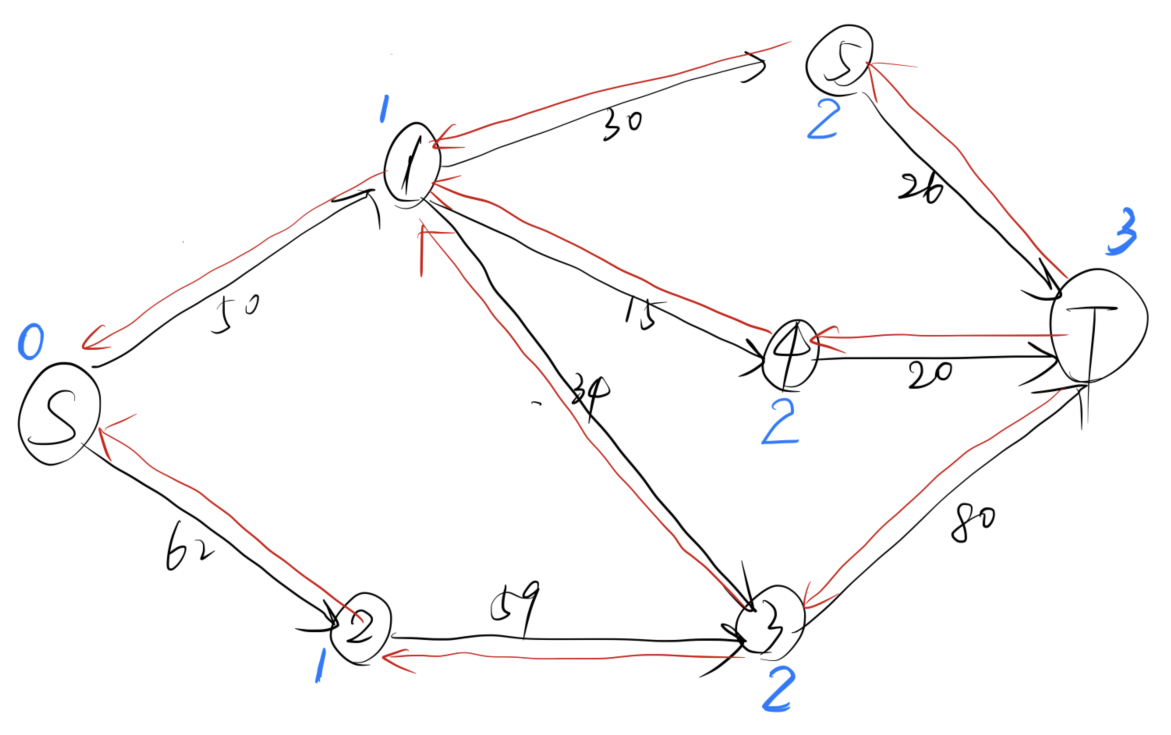
如果有分层的话(蓝色表示每个节点的层数),我们就一定不会选择 $S\to 1\to 2\to 4\to 5\to 3\to T$,因为 $3$ 的层数比 $5$ 要小,不可能在 $5$ 后才被拓展。
我们使用这个案例来解释 Dinic 都做了什么:
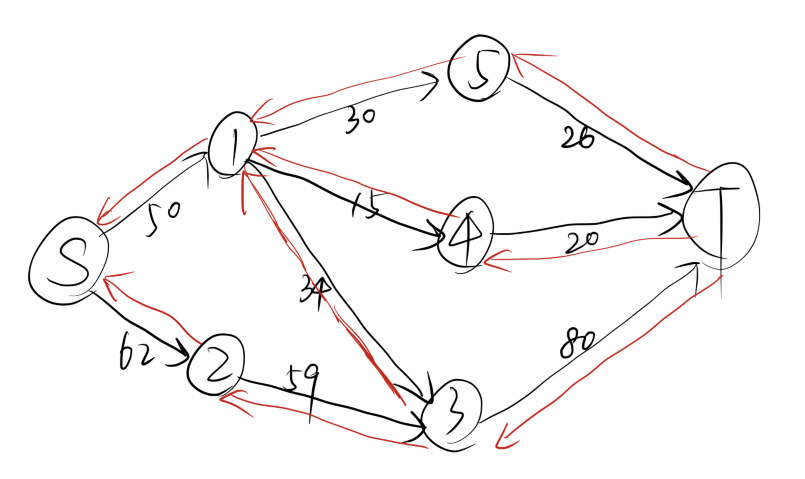
随后,我们会对这个网络进行分层:
我们发现,汇点的层数存在,因此存在增广路,于是我们通过 dfs 来寻找:
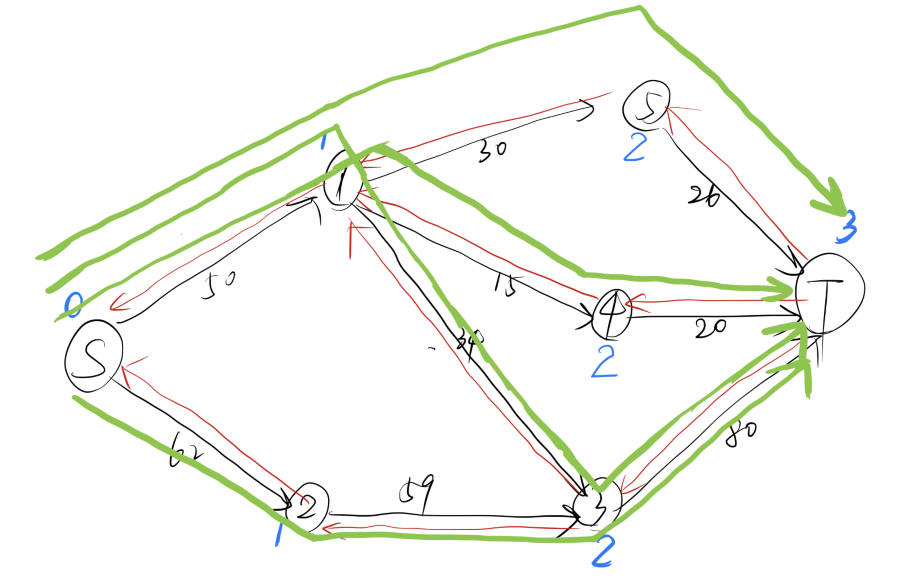
我们从 $S$ 出发,首先找到 $S\to 1\to 4\to T$ ,回溯后找到 $S\to 1\to 3\to T$ ,再次回溯后找到 $S\to 1\to 5\to T$ ,最后,我们还能找到 $S\to 2\to 3\to T$
这样,一次 dfs 我们就能找到4条增广路(高效的算法)
随后,我们会重复使用 BFS 对残量网络进行分层,并使用 DFS 进行增广路寻找,直到汇点层数为零,我们就求出了最大流。
代码如下:
#define maxn 250
#define INF 0x3f3f3f3f
struct Edge {
int from, to, cap, flow;
Edge(int u, int v, int c, int f) : from(u), to(v), cap(c), flow(f) {}
};
struct Dinic {
int n, m, s, t;
vector<Edge> edges;
vector<int> G[maxn];
int d[maxn], cur[maxn];
bool vis[maxn];
void init(int n) {
for (int i = 0; i < n; i++) G[i].clear();
edges.clear();
}
void AddEdge(int from, int to, int cap) {
edges.push_back(Edge(from, to, cap, 0));
edges.push_back(Edge(to, from, 0, 0));
m = edges.size();
G[from].push_back(m - 2);
G[to].push_back(m - 1);
}
bool BFS() {
memset(vis, 0, sizeof(vis));
queue<int> Q;
Q.push(s);
d[s] = 0;
vis[s] = 1;
while (!Q.empty()) {
int x = Q.front();
Q.pop();
for (int i = 0; i < G[x].size(); i++) {
Edge& e = edges[G[x][i]];
if (!vis[e.to] && e.cap > e.flow) {
vis[e.to] = 1;
d[e.to] = d[x] + 1;
Q.push(e.to);
}
}
}
return vis[t];
}
int DFS(int x, int a) {
if (x == t || a == 0) return a;
int flow = 0, f;
for (int& i = cur[x]; i < G[x].size(); i++) {
Edge& e = edges[G[x][i]];
if (d[x] + 1 == d[e.to] && (f = DFS(e.to, min(a, e.cap - e.flow))) > 0) {
e.flow += f;
edges[G[x][i] ^ 1].flow -= f;
flow += f;
a -= f;
if (a == 0) break;
}
}
return flow;
}
int Maxflow(int s, int t) {
this->s = s;
this->t = t;
int flow = 0;
while (BFS()) {
memset(cur, 0, sizeof(cur));
flow += DFS(s, INF);
}
return flow;
}
};
Dinic 算法有两个优化:
- 多路增广:每次找到一条增广路的时候,如果残余流量没有用完怎么办呢?我们可以利用残余部分流量,再找出一条增广路。这样就可以在一次 DFS 中找出多条增广路,大大提高了算法的效率。
- 当前弧优化:如果一条边已经被增广过,那么它就没有可能被增广第二次。那么,我们下一次进行增广的时候,就可以不必再走那些已经被增广过的边。
# 时间复杂度
设点数为 $n$,边数为 $m$,那么 Dinic 算法的时间复杂度(在应用上面两个优化的前提下)是 $O(n^{2}m)$
首先考虑单轮增广的过程。在应用了 当前弧优化 的前提下,对于每个点,我们维护下一条可以增广的边,而当前弧最多变化 $m$ 次,从而单轮增广的最坏时间复杂度为 $O(nm)$。
接下来我们证明,最多只需 $n-1$ 轮增广即可得到最大流。
我们先回顾下 Dinic 的增广过程。对于每个点,Dinic 只会找比该点层数多 $1$ 的点进行增广。
首先容易发现,对于图上的每个点,一轮增广后其层数一定不会减小。而对于汇点 $t$,情况会特殊一些,其层数在一轮增广后一定增大。
对于后者,我们考虑用反证法证明。如果 $t$ 的层数在一轮增广后不变,则意味着在上一次增广中,仍然存在着一条从 $s$ 到 $t$ 的增广路,且该增广路上相邻两点间的层数差为 $1$。这条增广路应该在上一次增广过程中就被增广了,这就出现了矛盾。
从而我们证明了汇点的层数在一轮增广后一定增大,即增广过程最多进行 $n-1$ 次。
综上 Dinic 的最坏时间复杂度为 $O(n^{2}m)$。事实上在一般的网络上,Dinic 算法往往达不到这个上界。
特别地,在求解二分图最大匹配问题时,Dinic 算法的时间复杂度是 $O(m\sqrt{n})$。接下来我们将给出证明。
首先我们来简单归纳下求解二分图最大匹配问题时,建立的网络的特点。我们发现这个网络中,所有边的流量均为 $1$,且除了源点和汇点外的所有点,都满足入边最多只有一条,或出边最多只有一条。我们称这样的网络为 单位网络。
对于单位网络,一轮增广的时间复杂度为 $O(m)$,因为每条边只会被考虑最多一次。
接下来我们试着求出增广轮数的上界。假设我们已经先完成了前 $\sqrt{n}$ 轮增广,因为汇点的层数在每次增广后均严格增加,因此所有长度不超过 $\sqrt{n}$ 的增广路都已经在之前的增广过程中被增广。设前 $\sqrt{n}$ 轮增广后,网络的流量为 $f$,而整个网络的最大流为 $f’$,设两者间的差值 $d=f’-f$。
因为网络上所有边的流量均为 $1$,所以我们还需要找到 $d$ 条增广路才能找到网络最大流。又因为单位网络的特点,这些增广路不会在源点和汇点以外的点相交。因此这些增广路至少经过了 $d\sqrt{n}$ 个点(每条增广路的长度至少为 $\sqrt{n}$),且不能超过 $n$ 个点。因此残量网络上最多还存在 $\sqrt{n}$ 条增广路。也即最多还需增广 $\sqrt{n}$ 轮。
综上,对于包含二分图最大匹配在内的单位网络,Dinic 算法可以在 $O(m\sqrt{n})$ 的时间内求出其最大流。
# 题外(一种更好写也更快的算法)
在 Dinic 算法中,我们每次求完增广路后都要跑 BFS 来分层,有没有更高效的方法呢?
答案就是 ISAP 算法。
大家可以自己去学一学 ISAP 算法(