@slidestart
# Improving Simulated Anneling 4 CPP
Read this paper here
# CPP Def
给定一个图 $G = <V, E, W>$,我们期望找到一个顶点划分 $C$,将图划分为 $k$ 个互不相交的团(完全子图),并且所有团的边权和最大。
–
# CPP Def
即 $C = (c_1, c_2, \dots, c_k)$ ,$\forall 1 \leq i, j \leq k, i\not = j, c_i \cap c_j = \varnothing$ 且 $c_i, c_j$ 均为团 $\max{f(C)} = \max{\sum_{c\in C}(\sum_{i,j\in c}w_{ij})}$
# SA Framework
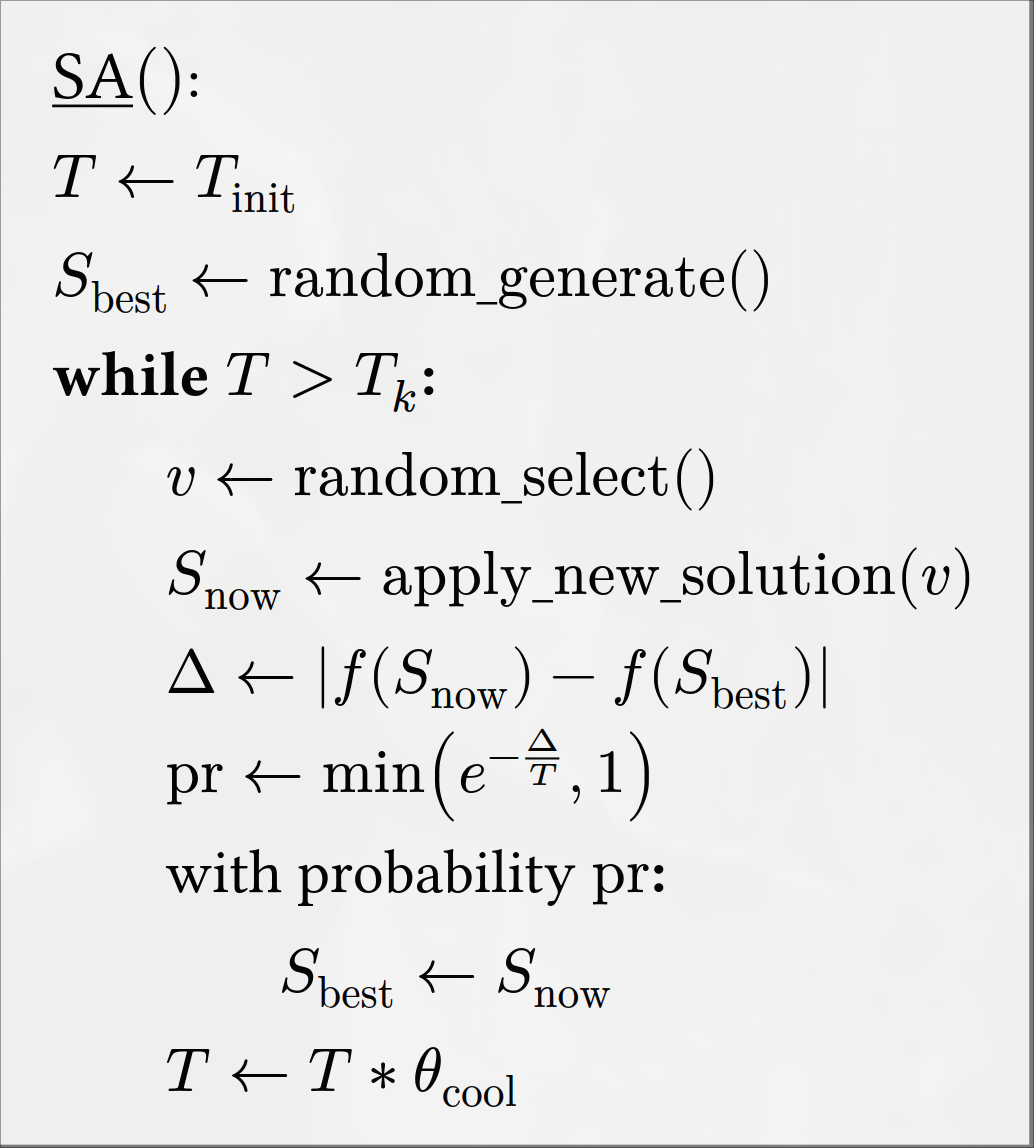
其中,$T_k$ 为终止温度,$\theta_{cool}$ 为降温系数。
–
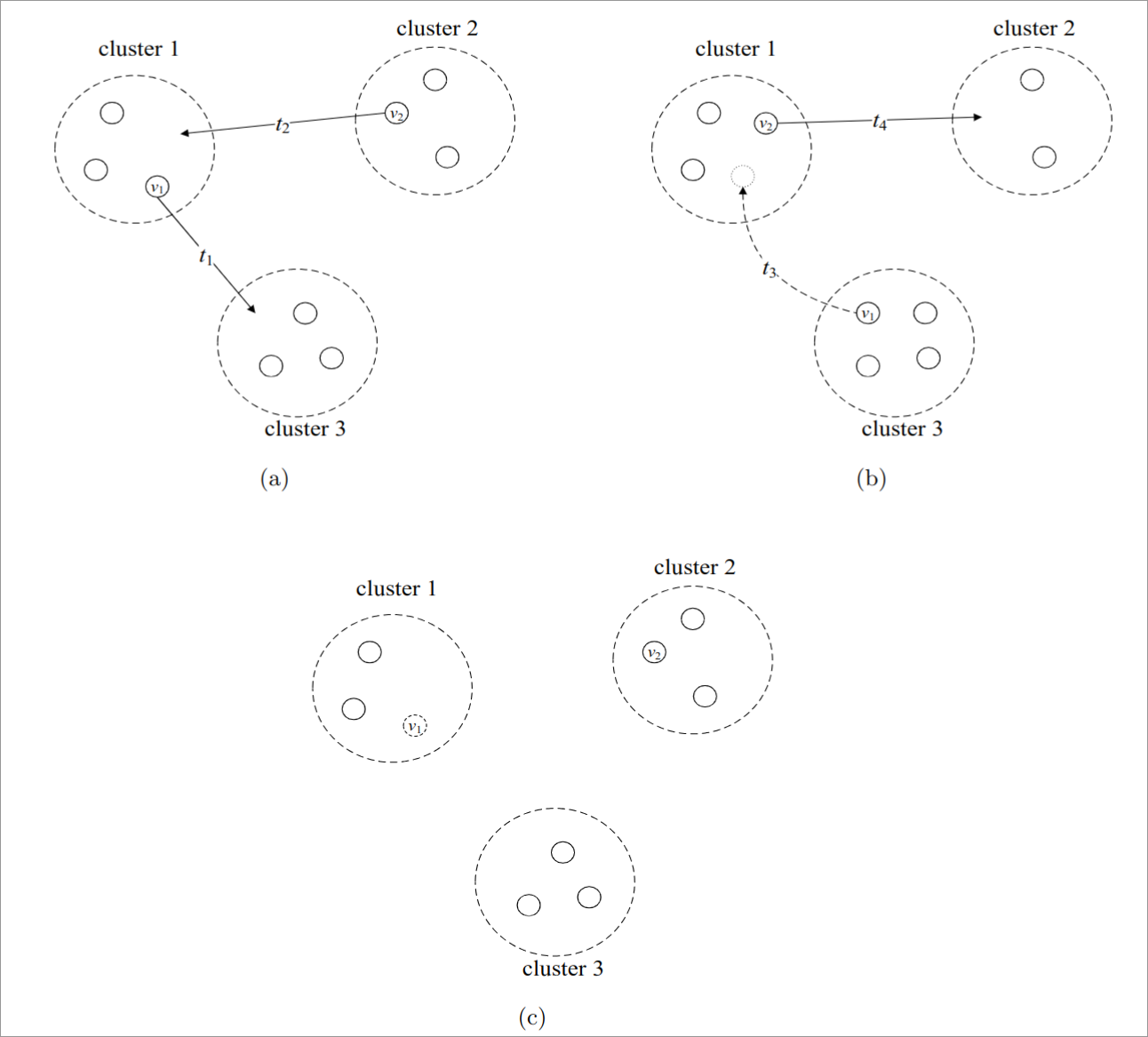
可以发现,朴素的 SA 框架没有任何的禁忌搜索策略,其跳出循环状态完全通过随机的方式跳出。我们很容易遇见如下情况:
# Configuration Checking
在 NuMVC 中使用的 Configuration Checking 可以很好的解决循环搜索的问题。
在 NuMVC 中其策略为,对于 $cc_v = 1$ 的顶点 $v$ ,我们可以加入解集中,否则,我们不能加入。
由于 Configuartion 的定义很灵活,因此可以根据问题来定义不同的格局。
–
# Configuration Def
在之前使用 cc 的问题中,其格局都定义为:对当前点 $v$ ,其邻居的状态。
但无论怎样,其定义都是 neighbor-based 的,但对于 CPP 问题,其实例中完全图较多

因此,如果我们依然像之前一样定义的话,那么对于一个顶点 $v$, 其 $config(v) = N(v) = V$
–
# Redef
由于我们每次只操作一个顶点 $v$,考量将 $v$ 移动到哪个团 $c_i$ 中去(注意,$c_i = \varnothing$ 是可以的),而搜索状态我们可以看作是团 $c_i$ 中的所有顶点。
如果在上一步我们将 $v$ 移出 $c_i$,在这一步显然我们不能把 $v$ 又重新放回去。
换而言之,只有当 $c_i$ 在 $v$ 移除后有新顶点被加入,我们才能够把 $v$ 移入 $c_i$
–
因此,我们给出格局的定义:
对于 $c_i$ 中的顶点 $v$,其格局定义为 $config(v, c_i) = \cup_{u \in c_i}{u} - {v}$,也就是团 $c_i$ 中除 $v$ 外的所有顶点。
# Configuration Checking
显然,我们不应该去维护一个集合,因为我们只关心自从 $v$ 移出 $c_i$ 后,$c_i$ 是否有任何改变,对于这一点,显然我们可以通过时间轴这一概念来实现。
–
# Timestamp-based Config
由于我们每次只需要操作一个顶点,所以,我们可以知道操作这个顶点时影响了哪些团的状态,并且记录下影响的时间。
通过比较时间的先后,我们就可以知道格局是否发生了变化。
–
考虑如下矩阵和向量:
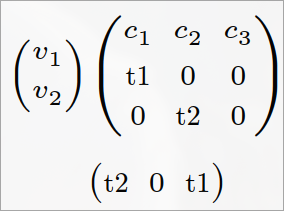
其对应的图为
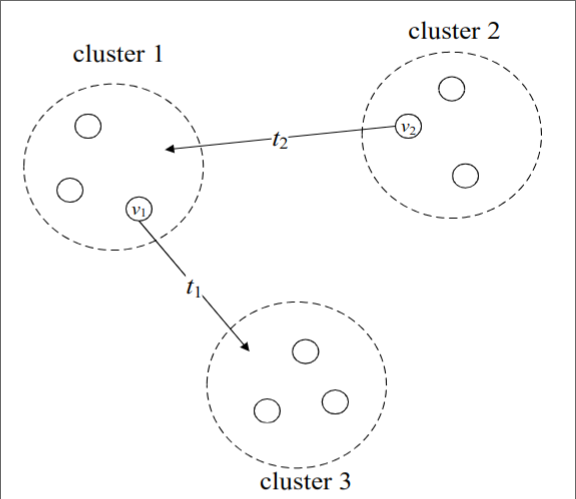
–
因此,当我们要将 $v$ 移入 $c_i$ 时,我们只需要查看 $config(v, c_i) < config(c_i)$
也就是 $c_i$ 状态改变的时间是否晚于 $v$ 移出 $c_i$ 的时间
# Improvment
通过实验发现,如果接受了目标函数减小的移动,会导致某些顶点不稳定,回退至之前的状态。
那么我们还是会重复搜索,所以,我们对格局进行进一步的修改
–
我们将 $config(v, c_i)$ 定义为一个二元对 $<tsvertex(v), tscluster(c_i)>$
$tsvertex(v)$ 表示 $v$ 最后一次有非负增益的时间 $tscluster(c_i)$ 表示 $c_i$ 最后一次非负增益移动后与 $c_i^{*}$ 不一样的时间
根据先前的定义,显然只有当 $tscluster(c_i) > tsvertex(v)$ 时,$v$ 才允许被移动到 $c_i$ 中
# SACC
问题求解的框架如图所示:
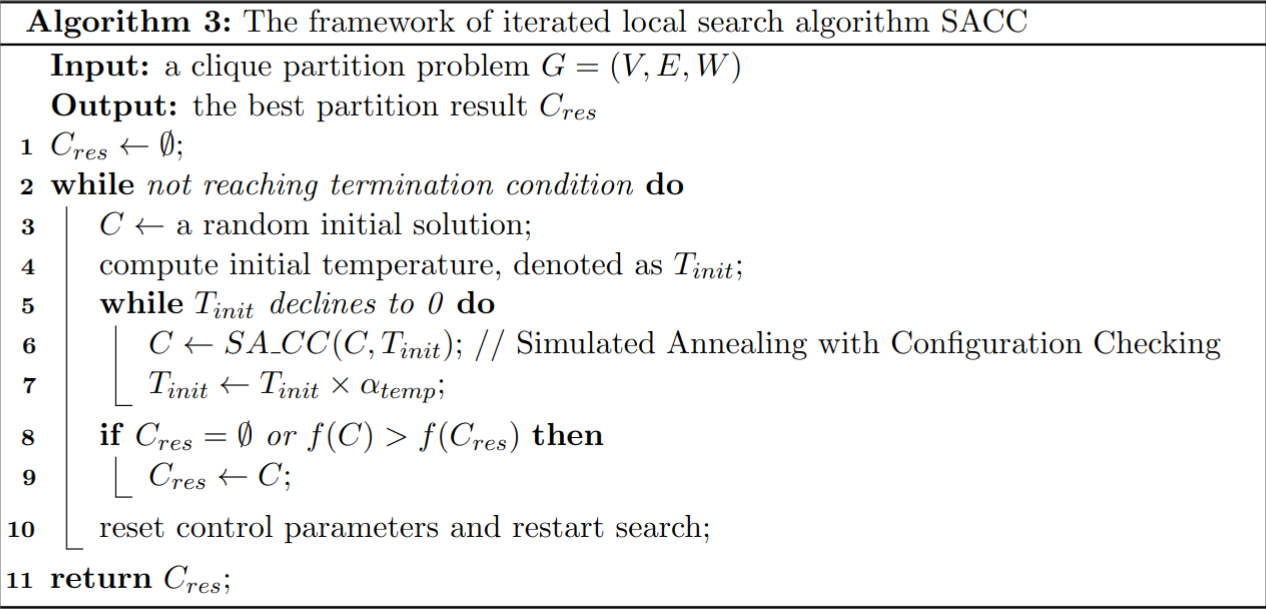
paper中并没有给出初始解如何随机生成,感觉应该不是 FSS 中复杂度为 $O(|V|^3)$ 的贪心
–
每次迭代都会降低初始温度,然后使用提高效率的 SA 算法进行求解。
这是因为在实验中发现,通过降低初始温度,能够很好的提高算法的收敛速度,随着初始温度的不断减小,搜索空间变小,收敛速度加快。
# SA_CC
模拟退火部分的框架如下所示:
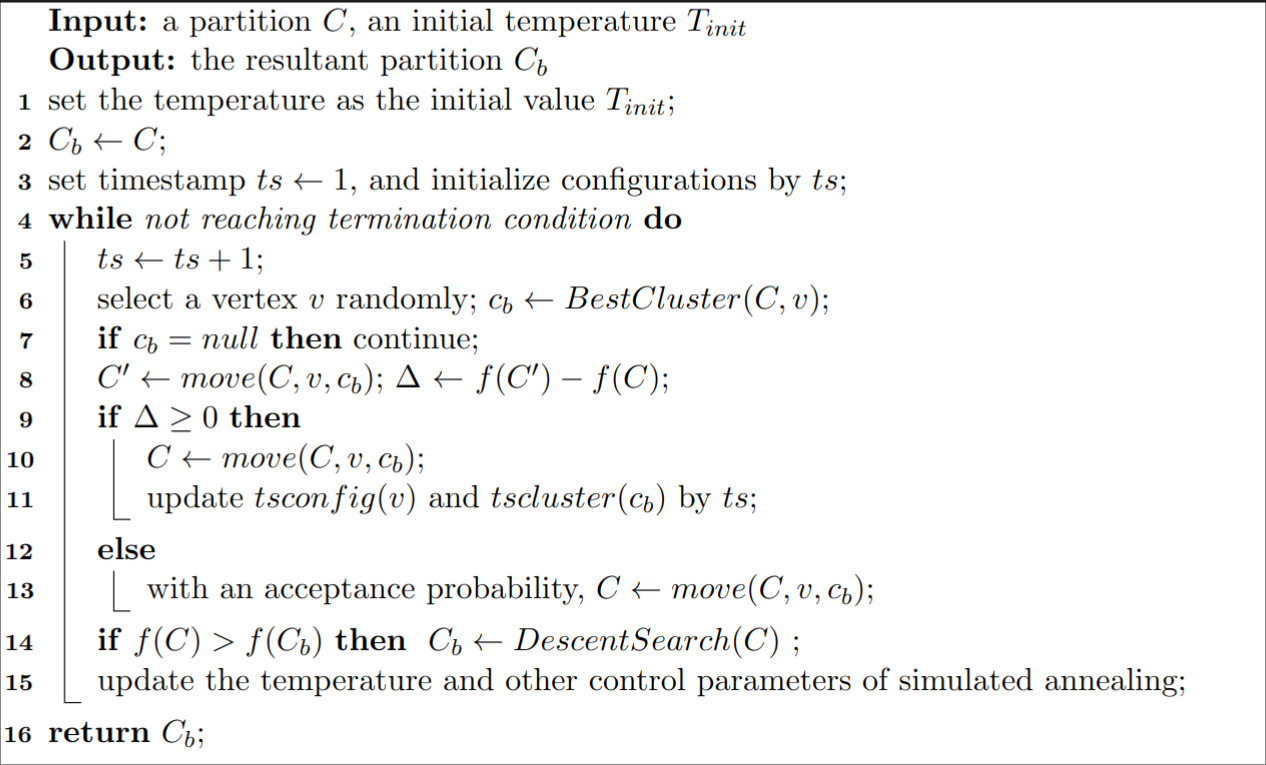
–
开始时,将 $tsvertex(v)$ 全置为 $0$, $tscluster(c_i)$ 全置为 $1$
随后,开始 SA 算法。
–
首先,随机选一个顶点 $v$,然后,通过 BestCluster 找到把此顶点转移过去的收益最大的团 $c_b$
–
然后计算势能 $\Delta$ ,而如果是非负移动的话,我们会接受此次移动,并且更新格局,否则以一定概率接受,并且不会更新格局
–
最后,更新最佳解决方案。如果找到更好的解决方案,我们应用下降搜索方法,进一步增强解决方案以找到局部最优。
# BestCluster
–
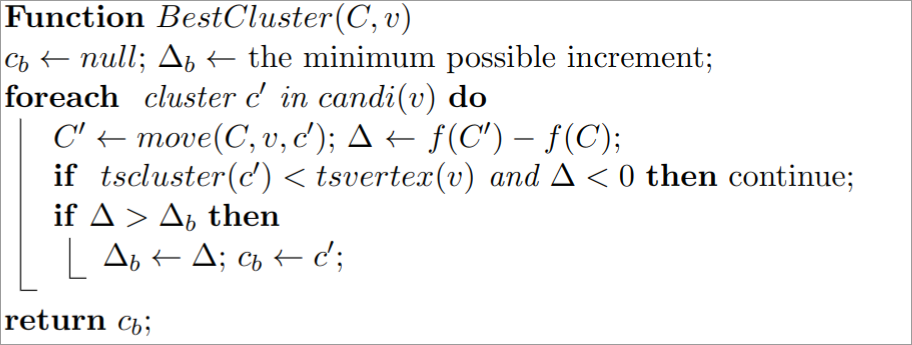
这里,$candi(v)$ 表示 $C\cup {\varnothing} - {c(v)}$,也就是除去当前顶点 $v$ 所在的团,剩下的所有团(有可能为空集)。
–
给定顶点 $v$,算法检查 $candi(v)$ 中的所有团,对每个团 $c^{\prime}$,如果格局允许移动,那么考虑将 $v$ 移到 $c^{\prime}$ 中带来的效益(势能)$\Delta$,并找到最大的 $\Delta$
# DescentSearch
–
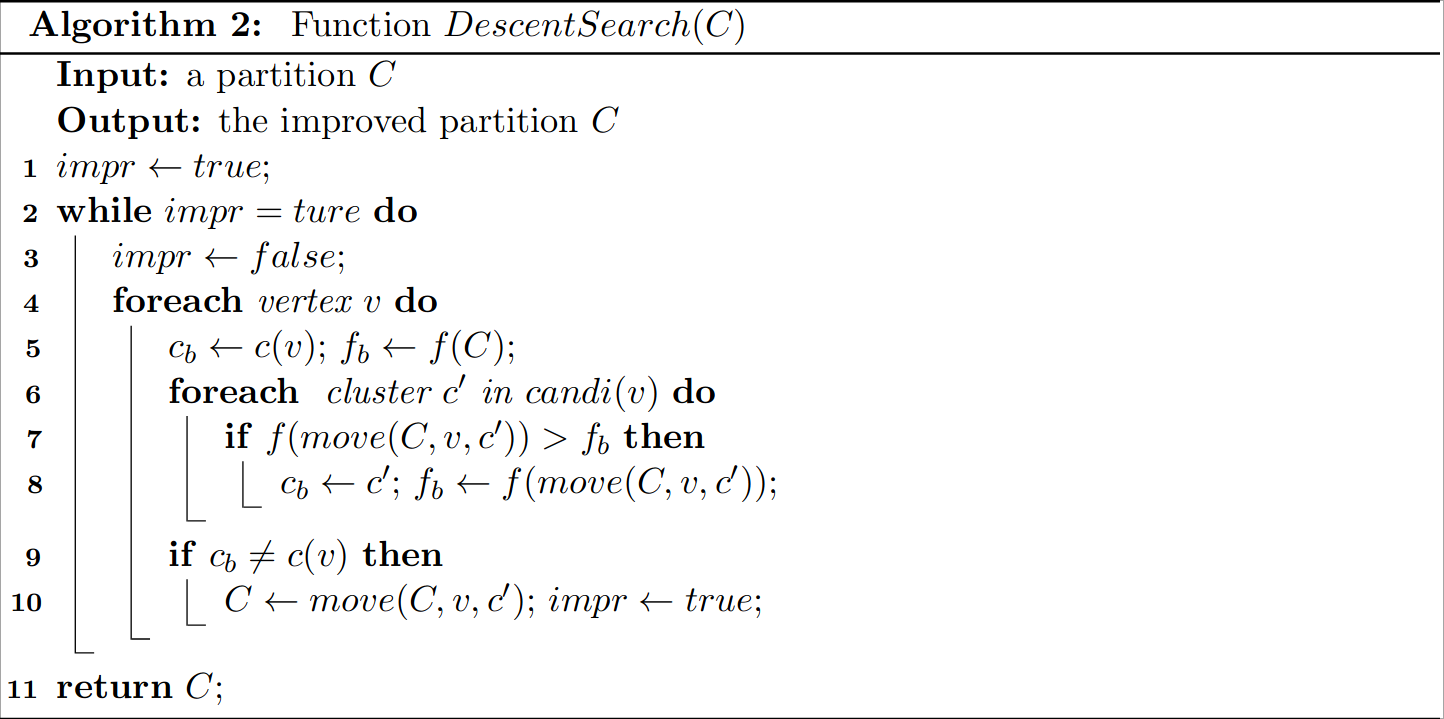
对每个顶点 $v$ ,尝试将顶点移动到所有其他团 $c^{\prime}$,并选出增量最大的团作为目标,并更新当前解。
重复选择和移动,直到没有可以改善目标的顶点移动。
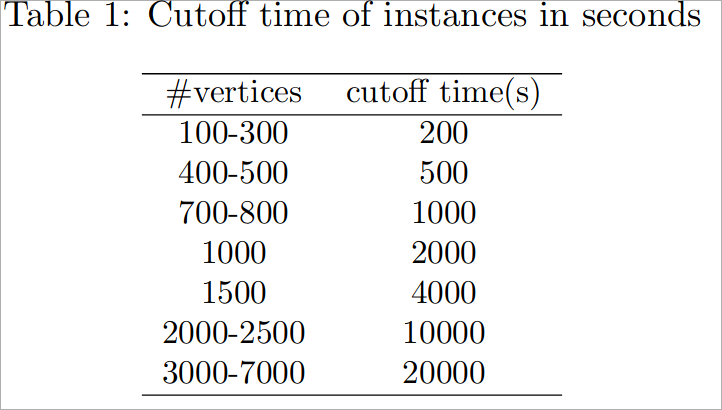
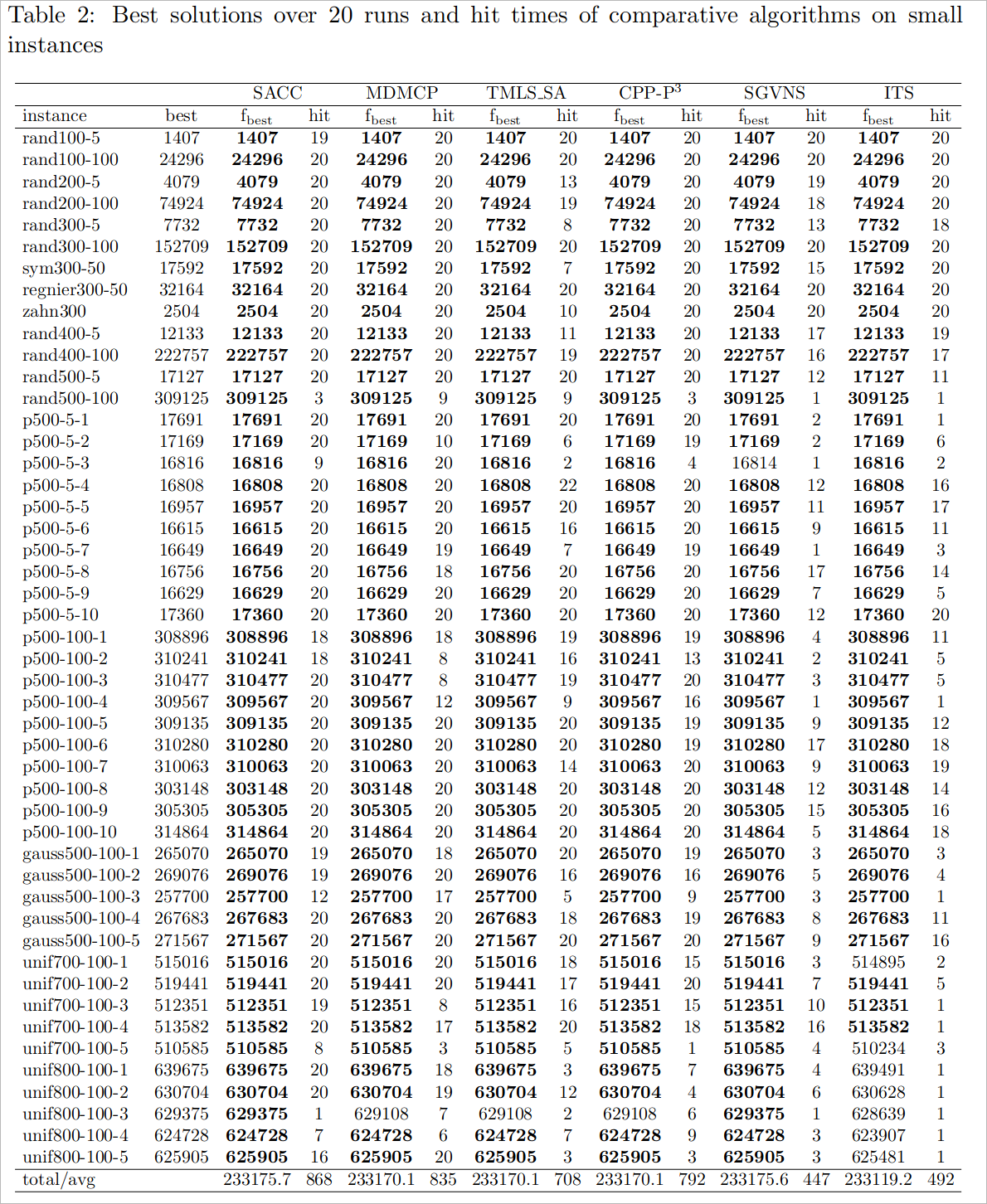
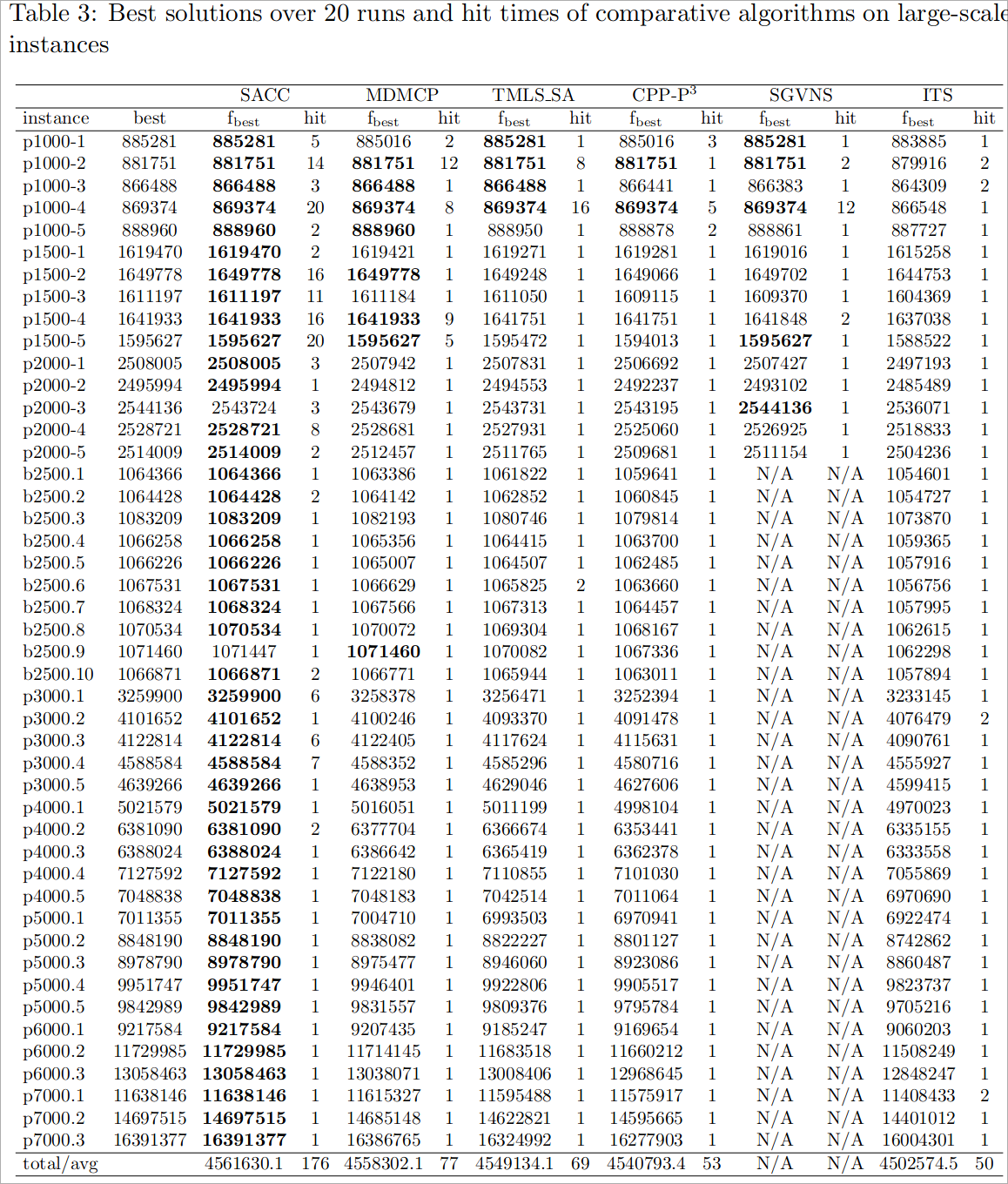
# Experiments
对比算法与 MDMCP 中的算法一致,也和 MDMCP 进行了对比,其使用的实例如图
注意,此算法的退火参数与
MDMCP的参数保持一致,除了独有的 $\alpha_{temp} = 0.98$
–
–
@slideend