感知机
感知机(perceptron) 是一种二分类的线性分类模型,也就是说,输入数据通过模型运算后可以输出分类的类别,由于是二分类,所以类比只有
我们举个例子,如果我们的输入空间是一个二维空间的话,那么感知机实际上就是找到一条直线,这条直线能把我们输入的点完全分为两个部分,如图所示:
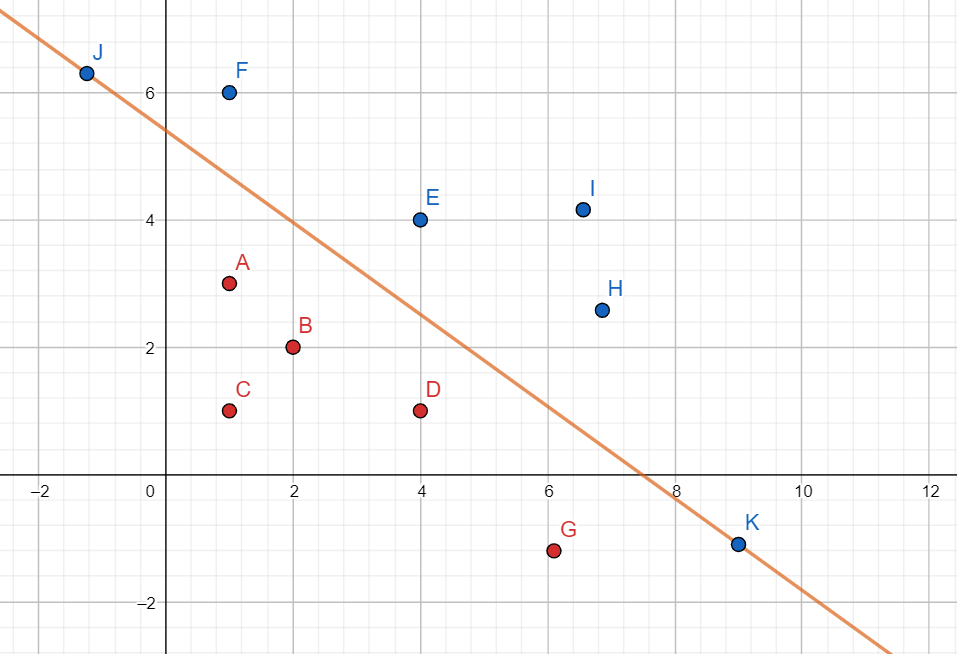
这条直线就是感知机做的事情,下面这些红色的点,感知机将其打上标签为 ,上面这些蓝色的点,感知机打上标签为
标签我们可以当做是这些点的颜色,不需要觉得这是另一个维度
在更高维度的输入空间中,感知机所做的就是 找到一个分离超平面,可以把输入空间内的点划分为正负两类
感知机模型
我们给出数学上模型的定义:
这里的 为符号函数:
称为权值向量, 称为偏置(bias)
我们可以发现,其实这个就是一个线性回归的模型,但是由于是分类问题,我们在这个基础上加了一个取符号的函数来满足二分类的性质而已。
感知机有如下的几何解释:线性方程
对应着输入空间中的一个超平面 ,其中 是超平面的法向量, 是超平面的截距。这个超平面将输入空间分为两个部分,位于两个部分的点分别被打上正类,负类的标签。因此超平面 称为分离超平面。
感知机的预测,就是对于新的输入实例,感知机输出其对应的类别。
感知机学习策略
首先,我们需要提出一个概念:线性可分性
如果对于一个数据集 ,我们可以找到一个超平面 使得 中的正实例点与负实例点完全划分到 的两侧,那么我们称 是线性可分的。
可以表示为 ,其中
举一个例子,类似于之前的那张图,那样的数据集就是线性可分的,但如果是这样的话,就是线性不可分的:
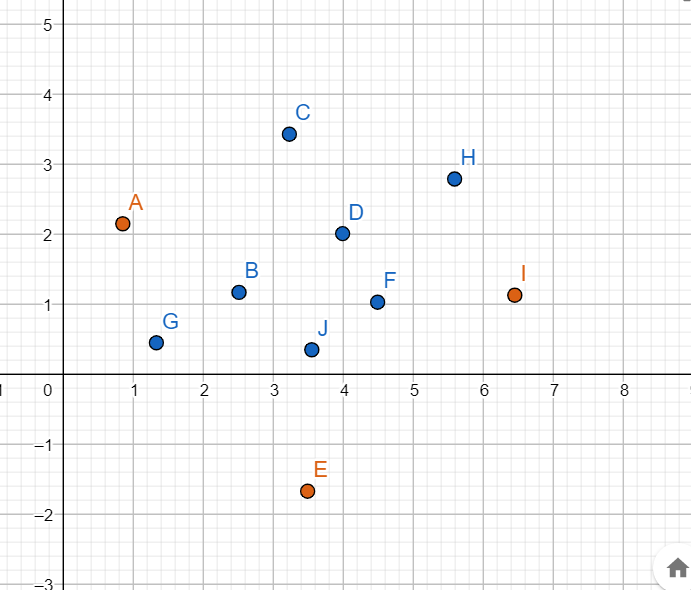
这种我们就没法找到一条直线,把蓝色和橙色的完全分开
现实当中线性不可分的例子占大多数
一般来说,我们假设数据集是线性可分的,那么我们目的就是寻找参数
但这里我们不应该使用 MSE 来解决问题了(因为 MSE 这个损失函数无法度量分类错误的损失),对于分类问题,我们最好的损失函数应该是误分点的数量,但这种损失函数不是连续可导的(数量显然是应该离散值),不易优化(即使用梯度下降来找最小值),于是我们需要想出一种能度量误分点的,又是连续可导的函数。
这里,我们构造损失函数 为:误分类点到超平面 的总距离,我们通过如下数学形式来描述:
-
首先,我们写出数据集中任意一点到 的距离(就是点到直线距离)
-
然后,对于误分类点 (就比如这个点的 ,但是 这种情况),我们有一个性质成立:
-
于是,误分类点 到超平面的距离可以写成:
为什么可以这么写呢?因为你要知道 只是正负一,所以我这里乘一个 只是为了保证 这个是正的,相当于取了一个绝对值了
所以,我们就可以构造 为:
这里的 是误分点的集合。
但我们发现,这个 好像没啥用处,而且算起来还麻烦(因为你分子小的话就行了,分母小没所谓,真正度量误分点距离的分子占的比重要大一些)
所以我们真正采用的损失函数是这样的:
显然这个损失函数的最小值为 ,也就是没有误分点的情况,但就像我之前说的,大多数数据集都是线性不可分的,所以有时候我们只是求出一个最优超平面,如果想要准确的话,我们会在 SVM 中详细讲述。
所以感知机挺拉跨的(因为它要求数据集线性可分,这样它的训练算法才收敛,否则就寄了)
感知机的训练
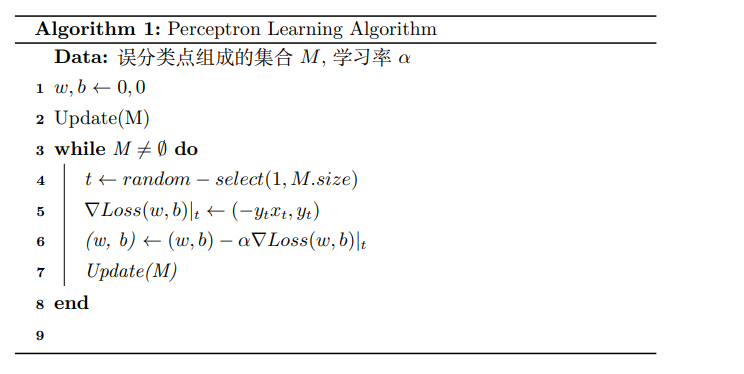
感知机的训练采用了随机梯度下降,我们用一张图来描述它的算法,并手算一个实例来帮助理解。
首先我们知道,对 求梯度得到 ,而由于我们是随机梯度下降,所以每次我们都只从 中随机选择一个点 来进行梯度下降,这样我们写作
算法如图所示:
我们举一个例子:
我们有这样一个数据集,其中正实例点为 ,负实例点 ,请训练一个感知机模型 ,其中学习率
迭代过程如下图所示:
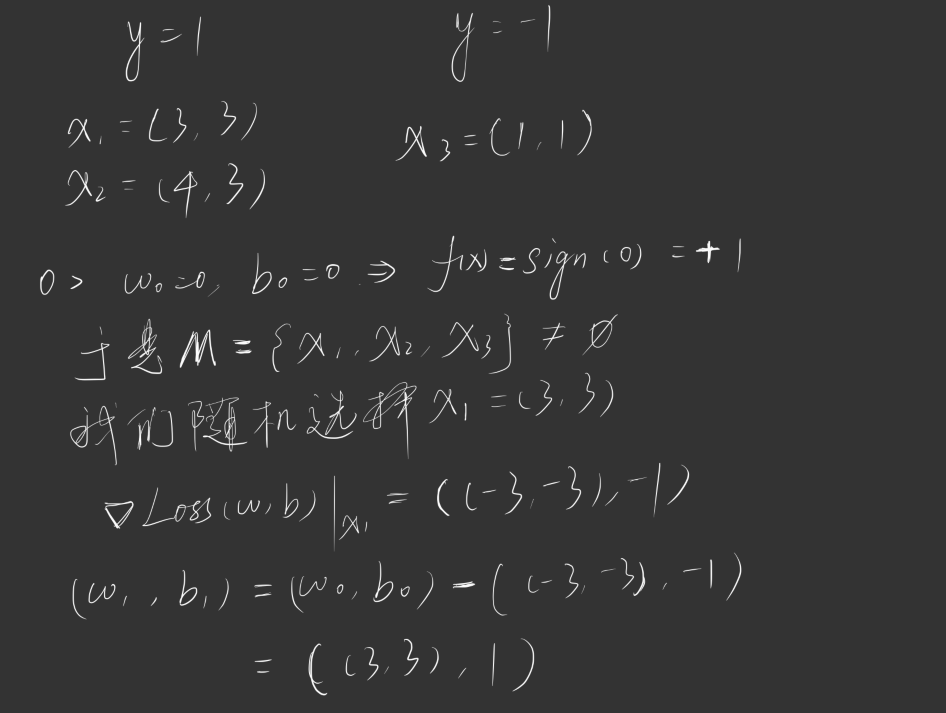
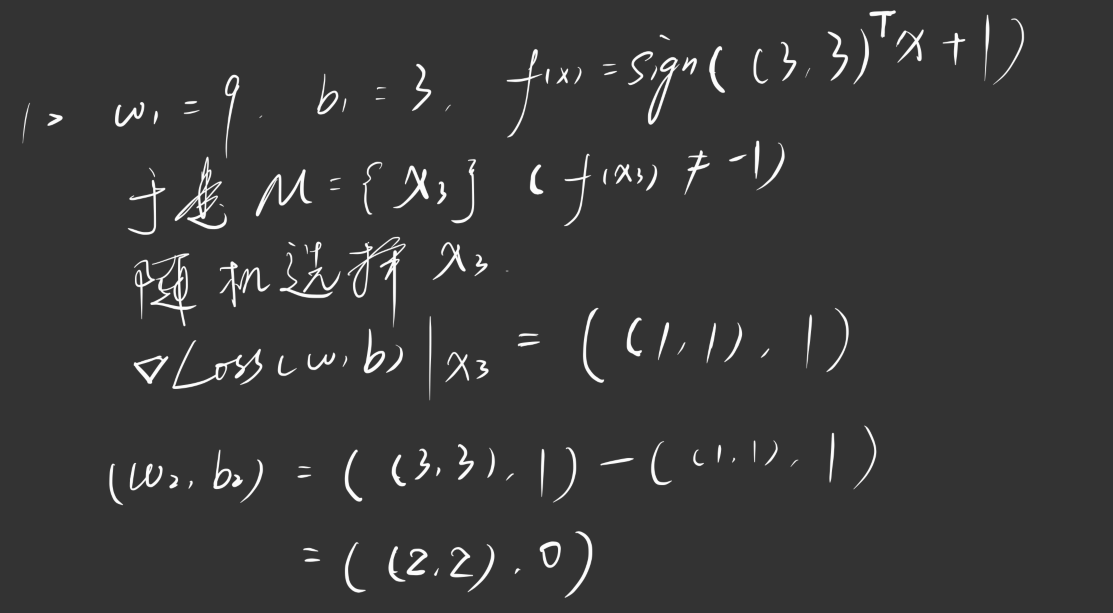
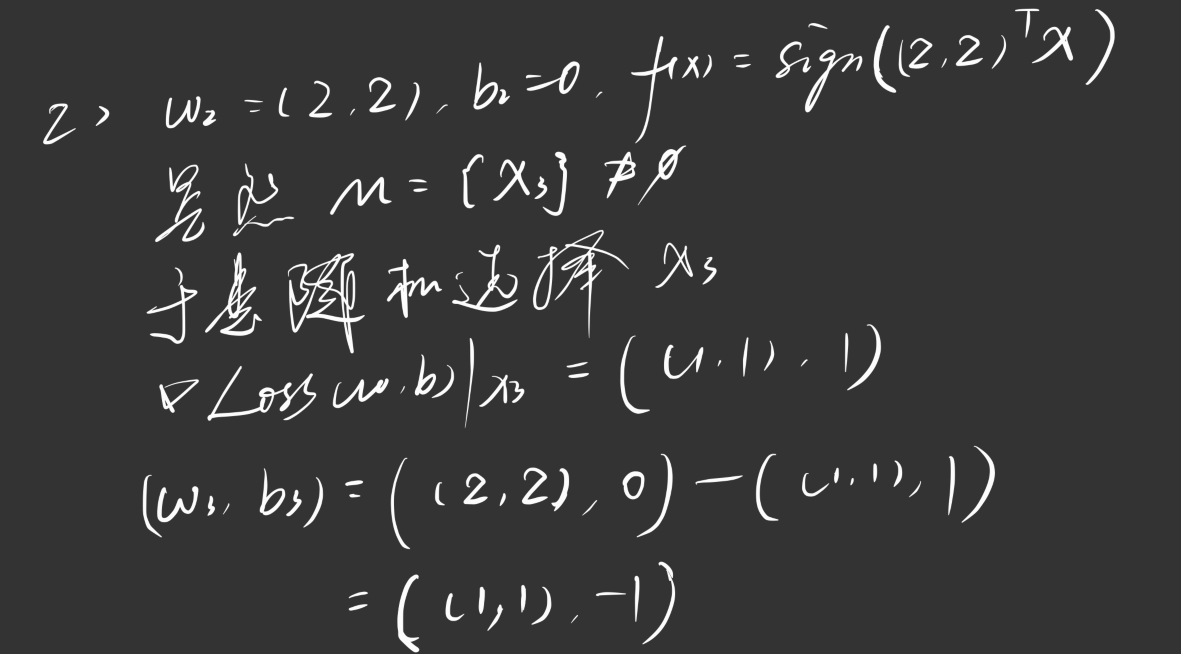
依此类推,直到 为空集终止迭代。
值得一提的是,这个分离超平面不是唯一的,会随着我们每次随机选择的不同样本而计算出不同的分离超平面(与 SVM 不同),我这里算出来的是
神经网络
来到了一个很熟悉的名词,但你可能并不真的知道这到底是什么。
我们先来看刚刚说的感知机,事实上我们可以把感知机图形化为这样的形式:
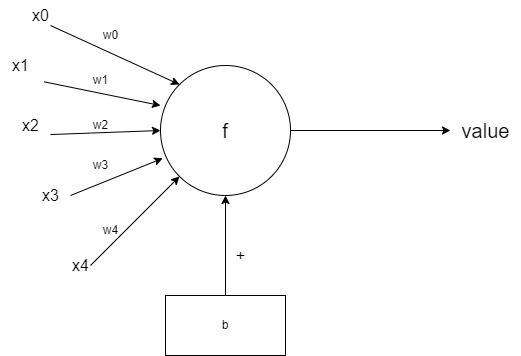
也就是说,左边我们可以看成一个矩阵的乘法,然后加上下面的偏置 b ,这样我们得到了一个值,假设为 temp ,然后我们通过一个函数变换 f,可能是取符号 函数,或其他等等,最后,我们得到了一个输出 value ,那么我们可以把这个感知机模型数学化为:
其中,我们称 为权值矩阵, 为偏置, 为激活函数。
这种图形化的形式其实我们见过很多次,被称为 神经元模型,因此,一个神经网络,就是由很多个神经元连接而成,换而言之,就是由很多个这样的感知机连接而成的,因此神经网络又被称为多层感知机(MLP)
网络的连接方式
在朴素的神经网络中(没有卷积没有循环什么的),我们的神经元的排列与连接是非常朴素的,我们通常将 个神经元排成一排,称为网络的一层,然后我们把 层神经元通过特定的方式连接起来,就组成了一个神经网络,如图所示:
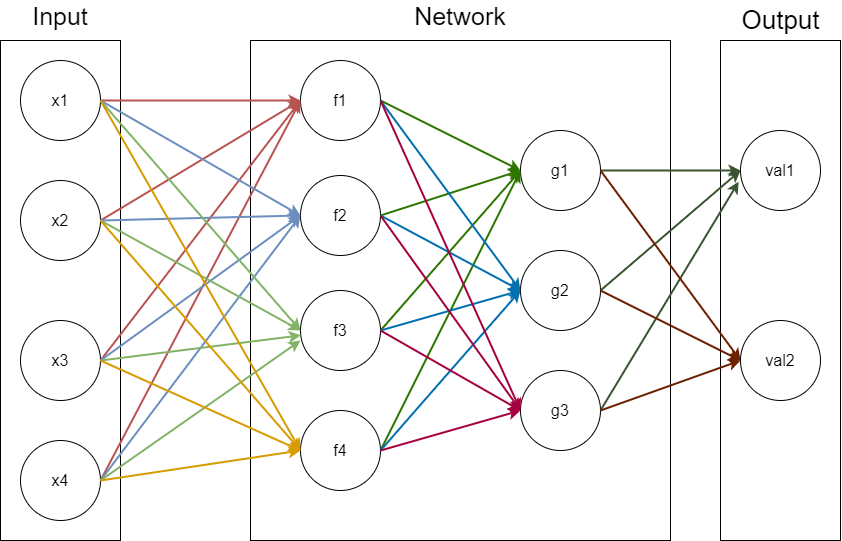
我们用数学来解释一下上面这个网络。
首先,我们看到 这个过程,注意,每一个箭头都代表了一个权值(网络中的圆代表着一个感知机),于是我们可以用这样描述:
,这里的 是一个矩阵,代表了对应到 的权值矩阵
类似的,我们可以把 也用这样的形式写出来,并将其写为一个向量的话,就变成了:
那么从 ,我们可以描述为:
如果我们写完整的话,就会发现这个 套娃了两个 ,而且还有一大堆 ,如果我们多加几层的话,最后我们表达出来的函数式会异常复杂,那么这个 到底是什么操作呢?
激活函数
就是我们常说的激活函数,这个函数为什么在深度学习领域很重要,就是因为只有存在这个函数,我们才能够让我们的网络符合能够拟合任意形状的函数这一特性。
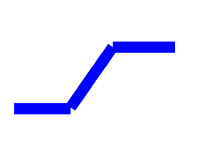
我们举这样一个例子:现在你有这么多的蓝色函数,如果我给你一个 Z 型的红色函数,你怎么用这些蓝色函数拟合出来?
我们可以发现,其实我们可以通过截取这个的图形的一部分,然后加上一些截距(也就是偏置),拼凑起来得到红色的曲线:
但……这样似乎还不够,如果我们今天想要拟合的是曲线函数呢?比如这样的:
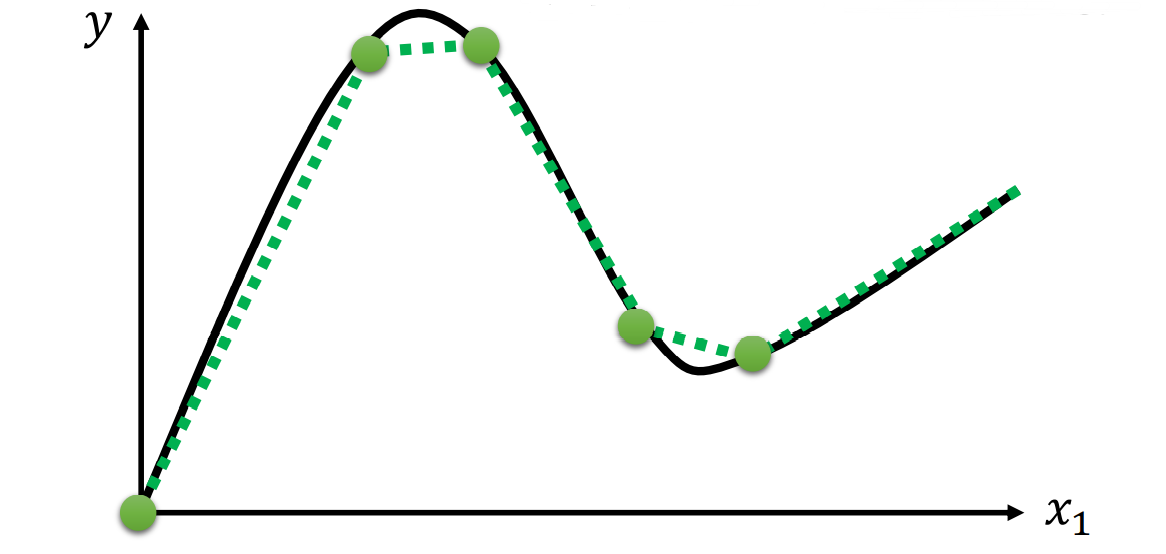
我们用刚刚那种图形就没办法很精细的拟合出来了,但别急,我们可以把我们万能的图形变得平滑一些:
我们引入这样一个函数,一个 型的连续可导函数,并且至于在 之间,这样,通过线性变换(也就是截取需要的部分),我们就可以拟合任意形状的函数了。
那么,这样我们就知道激活函数到底是用来做什么的了。就是我们通过运算(权值矩阵与偏置的运算),从这个激活函数中截取出一部分来拟合原本的函数,如果精度不够,那就多加几个神经元来拟合。
用数学一些的话来解释的话就是:
如果不用激活函数,每一层输出都是上层输入的线性函数,无论神经网络有多少层,输出都是输入的线性组合,这种情况就是最原始的感知机,如果使用的话,激活函数给神经元引入了非线性因素,使得神经网络可以任意逼近任何非线性函数,这样神经网络就可以应用到众多的非线性模型中。
常用的激活函数
-
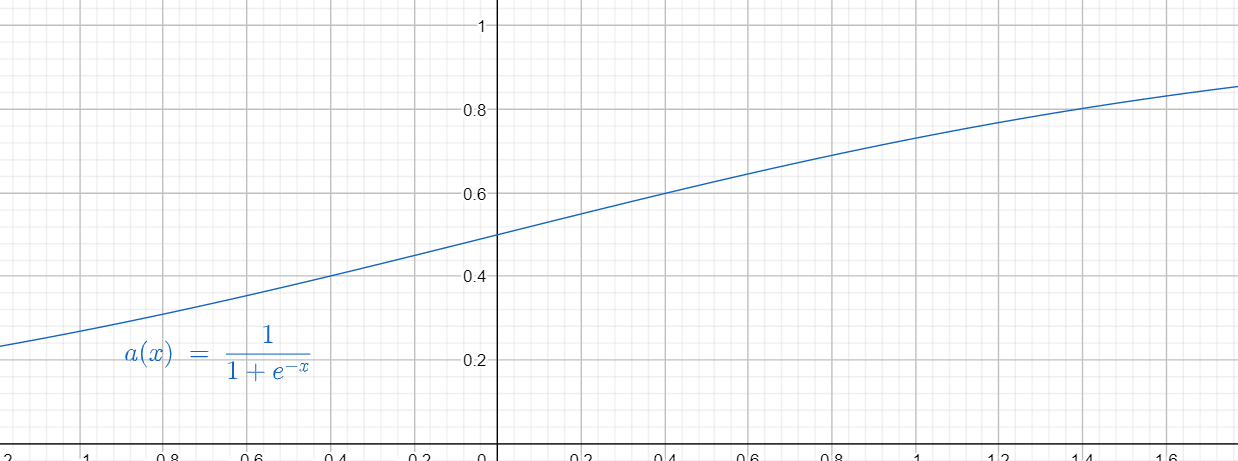
sigmoid值域在之间,是便于求导的平滑函数,为最常用的激活函数之一。
sigmoid的导函数为:但 Sigmoid 有三大缺点:
- 容易导致梯度消失问题,是因为
sigmoid函数在 0 和 1 这些区域接近饱和,梯度几乎为 0,这对梯度下降来说是致命的(大多数自适应的 Learning Rate 是在衰减的)。 sigmoid不是关于原点对称的,收敛速度慢- 幂运算耗时
虽然缺点很多,但还是经常使用,因为实在是太经典了(bushi
- 容易导致梯度消失问题,是因为
-
tanh解决了关于原点对称的问题,但是依然存在梯度消失的问题
-
ReLU family此处介绍
ReLU,Leaky ReLU。ReLU全名为Linear rectification functionReLU:优点:
- 解决了梯度消失的问题
- 计算速度快
- 收敛速度快
缺点:
Dead ReLU Problem,最直观的结果就是,输入ReLU中的值如果存在负数,则最终经过ReLU之后变成 0,极端情况下是输入ReLU的所有值全都是负数,则经过ReLU之后的结果均为 0。Leaky ReLU:不会有
Dead ReLU问题,输出的均值接近 0,它的一个小问题在于计算量稍大。
在神经网络隐藏层不多的时候,通常使用Sigmoid或tanh函数,在深度学习中常用ReLU家族的函数。
网络的训练( BP 算法)
暂时不知道你们机器学习会不会学这部分,我们当时是学了的,但是统计学习方法上面没这个
放一个李宏毅的视频链接,讲的挺明白的:BP 算法